Широтно-імпульсна модуляція (ШІМ). Аналогова та цифрова. ШИМ та PWM - що це таке? Шим регулятор струму та напруги
У цій статті наводиться опис двох важливих схем регулятора заснованих на постійного струму, які реалізовані на базі операційного підсилювача К140УД6.
ШИМ регулятор напруги 12 вольт - опис
Особливістю даних схем є можливість застосувати фактично будь-які наявні операційні підсилювачі з напругою живлення на рівні 12 вольт, наприклад, або .
Змінюючи величину напруги на вході, що не інвертує, операційного підсилювача (висновок 3) можна змінювати величину вихідної напруги. Таким чином, ці схеми можна використовувати як регулятор струму і напруги, в димерах, а також як регулятор обертів двигуна постійного струму.
Схеми досить прості, складаються з простих та доступних радіокомпонентів і при правильному монтажі відразу починають працювати. Як керуючий ключ застосований потужний польовий n-канальний транзистор. Потужність польового транзистора, а так само площу радіатора, необхідно підібрати згідно струму споживання навантаження.
Для попередження пробою затвора польового транзистора, у разі використання ШІМ регулятора з напругою живлення 24 вольта, необхідно між затвором VT2 і колектором транзистора VT1 підключити опір величиною 1 кОм, а паралельно опору R7 підключити стабілітрон на 15 вольт.
Якщо потрібно змінювати напругу на навантаженні, один з контактів якої приєднаний до «маси» (таке зустрічається в автомобілі), то застосовується схема, в якій до плюсу джерела живлення приєднується стік n-канального польового транзистора, а навантаження підключається до його початку.
![]()
Бажано для створення умов, при якому відкриття польового транзистора відбуватиметься повною мірою, ланцюг управління затвором повинен містити вузол з підвищеною напругою близько 27-30 вольт. У цьому випадку напруга між витоком та затвором буде більше 15 Ст.
Якщо струм споживання навантаженням менше 10 ампер, то можна застосувати в ШІМ регуляторі потужні польові p-канальні транзистори.
У другій схемі ШИМ регулятор напруги 12 вольтзмінюється вид транзистора VT1, і навіть змінюється напрям обертання змінного резистора R1. Так у першого варіанта схеми зменшення напруги управління (ручка переміщається до «-» джерела живлення) викликає збільшення напруги на виході. У другого варіанта все на оборот.
kravitnik.narod.ru

Портативний USB осцилограф, 2 канали, 40 МГц.

Принцип ШІМ – широтно-імпульсна модуляція полягає у зміні ширини імпульсу за сталості частоти проходження імпульсу. Амплітуда імпульсів у своїй незмінна.
Широтно-імпульсне регулювання знаходить застосування там, де потрібно регулювати потужність, що подається до навантаження. Наприклад, у схемах керування електродвигунами постійного струму, в імпульсних перетворювачах, для регулювання яскравості світлодіодних світильників, екранів РК-моніторів, дисплеїв у смартфонах та планшетах тощо.
Більшість вторинних джерел живлення електронних пристроїв в даний час будуються на основі імпульсних перетворювачів, застосовується широтно-імпульсна модуляція і в підсилювачах низької (звукової) частоти класу D, зварювальних апаратах, пристроях зарядки автомобільних акумуляторів, інверторах та ін. ККД) вторинних джерел живлення порівняно з низьким ККД аналогових пристроїв.
Широтно-імпульсна модуляція буває аналогової та цифрової.
Аналогова широтно-імпульсна модуляція
Як згадувалося вище, частота сигналу та її амплітуда при ШИМ завжди постійні. Один із найважливіших параметрів сигналу ШІМ – це коефіцієнт заповнення, що дорівнює відношенню тривалості імпульсу tдо періоду імпульсу T. D = t/T . Так, якщо маємо сигнал ШІМ із тривалістю імпульсу 300 мкс та періодом імпульсу 1000 мкс, коефіцієнт заповнення складе 300/1000 = 0,3. Коефіцієнт заповнення також виражається у відсотках, навіщо коефіцієнт заповнення множиться на 100%. За прикладом вище відсотковий коефіцієнт заповнення становить 0,3 х 100% = 30%.
Свердловість імпульсу – це ставлення періоду імпульсів до тривалості, тобто. величина, обернена коефіцієнту заповнення. S = T/t .
Частота сигналу визначається як величина, зворотна періоду імпульсу, і є кількістю повних імпульсів за 1 секунду. Для прикладу вище за період 1000 мкс = 0,001 с, частота становить F= 1/0,001 - 1000 (Гц).
Сенс ШІМ полягає у регулюванні середнього значення напруги шляхом зміни коефіцієнта заповнення. Середнє значення напруги дорівнює добутку коефіцієнта заповнення та амплітуди напруги. Так, при коефіцієнті заповнення 0,3 та амплітуді напруги 12 В середнє значення напруги складе 0,3 х 12 = 3,6 (В). При зміні коефіцієнта заповнення теоретично можливих межах від 0% до 100% напруга буде змінюватися від 0 до 12 В, тобто. Широтно-імпульсна модуляція дозволяє регулювати напругу від 0 до амплітуди сигналу. Що і використовується для регулювання швидкості обертання електродвигуна постійного струму або яскравості світильника.
Сигнал ШІМ формується мікроконтролером або аналоговою схемою. Цей сигнал зазвичай керує потужним навантаженням, яке підключається до джерела живлення через ключову схему на біполярному або польовому транзисторі. У ключовому режимі напівпровідниковий прилад або розімкнутий, або замкнутий, проміжний стан виключається. В обох випадках на ключі розсіюється мізерна теплова потужність. Оскільки ця потужність дорівнює добутку струму через ключ на падіння напруги на ньому, а в першому випадку до нуля близький струм через ключ, а в другому напруга.
У перехідних станах на ключі є значна напруга з проходженням значного струму, тобто. значна і теплова потужність, що розсіюється. Тому як ключ необхідно застосування малоінерційних напівпровідникових приладів зі швидким часом перемикання, близько десятків наносекунд.
Якщо ключова схема керує світлодіодом, то при малій частоті сигналу світлодіод блиматиме в такт зі зміною напруги сигналу ШІМ. При частоті сигналу вище 50 Гц миготіння зливаються внаслідок людської інерції зору. Загальна яскравість свічення світлодіода починає залежати від коефіцієнта заповнення – що нижчий коефіцієнт заповнення, то слабкіше світиться світлодіод.
При управлінні за допомогою ШІМ швидкості обертання двигуна постійного струму частота ШІМ має бути дуже високою, і лежати поза чутних звукових частот, тобто. перевищувати 15-20 кГц, інакше двигун «звучатиме», видаючи дратівливий слух писк із частотою ШІМ. Від частоти залежить стабільність роботи двигуна. Низькочастотний сигнал ШІМ з невисоким коефіцієнтом заповнення призведе до нестабільної роботи двигуна і навіть можливої його зупинки.
Тим самим, при керуванні двигуном бажано підвищувати частоту сигналу ШІМ, але і тут існує межа, що визначається інерційними властивостями напівпровідникового ключа. Якщо ключ перемикатиметься із запізнюваннями, схема управління почне працювати з помилками. Щоб уникнути втрат енергії і досягти високого коефіцієнта корисної дії імпульсного перетворювача, напівпровідниковий ключ повинен мати високу швидкодію і низький опір провідності.
Сигнал із виходу ШІМ можна також усереднювати за допомогою найпростішого фільтра низьких частот. Іноді можна обійтися і без цього, оскільки має певну електричну індуктивність і механічну інерцію. Згладжування сигналів ШІМ відбувається природним шляхом у тому випадку, коли частота ШІМ перевищує час реакції регульованого пристрою.
Реалізувати ШІМ можна за допомогою двох входів, на один з яких подається періодичний пилкоподібний або трикутний сигнал від допоміжного генератора, а на інший модулюючий сигнал управління. Тривалість позитивної частини імпульсу ШІМ визначається часом, протягом якого рівень сигналу, що подається на один вхід компаратора, перевищує рівень сигналу допоміжного генератора, що подається на інший вхід компаратора.
При напрузі допоміжного генератора вище напруги сигналу керуючого на виході компаратора буде негативна частина імпульсу.
Коефіцієнт заповнення періодичних прямокутних сигналів на виході компаратора, а тим самим і середня напруга регулятора, залежить від рівня сигналу, що модулює, а частота визначається частотою сигналу допоміжного генератора.
Цифрова широтно-імпульсна модуляція
Існує різновид ШІМ, званий цифровий ШІМ. У цьому випадку період сигналу заповнюється прямокутними підимпульсами, і регулюється кількість підимпульсів в періоді, що і визначає середню величину сигналу за період.
![]()
У цифровий ШІМ піднімпульси (або «одинички»), що заповнюють період, можуть стояти в будь-якому місці періоду. Середнє значення напруги за період визначається лише їх кількістю, при цьому підимпульси можуть йти один за одним і зливатися. Підімпульси, що окремо стоять, призводять до посилення режиму роботи ключа.
Як джерело сигналу цифровий ШІМ можна використовувати COM-порт комп'ютера з 10-бітовим сигналом на виході. З урахуванням 8 інформаційних бітів і 2 бітів старт/стоп, в сигналі COM-порту є від 1 до 9 «одиничок», що дозволяє регулювати напругу в межах 10-90% напруги живлення з кроком в 10%.
Найбільш простий метод регулювання швидкості обертання двигуна постійного струму заснований на використанні широтно імпульсної модуляції (ШІМ або PWM). Суть цього методу полягає в тому, що напруга живлення подається на двигун у вигляді імпульсів. У цьому частота слідування імпульсів залишається постійної, які тривалість може змінюватися.
ШИМ сигнал характеризується таким параметром, як коефіцієнт заповнення або Duty cycle. Це величина зворотна шпаруватості і дорівнює відношенню тривалості імпульсу до його періоду.
D = (t/T) * 100%
На рисунках нижче зображені ШІМ сигнали з різними коефіцієнтами заповнення.
При такому методі керування швидкість обертання двигуна буде пропорційна коефіцієнту заповнення ШІМ сигналу.
Проста схема керування двигуном постійного струму
Найпростіша схема керування двигуном постійного струму складається з польового транзистора, на затвор якого подається ШІМ сигнал. Транзистор у цій схемі виконує роль електронного ключа, що комутує один із висновків двигуна на землю. Транзистор відкривається на момент тривалості імпульсу.

Як поводитиметься двигун у такому включенні? Якщо частота ШИМ сигналу буде низькою (одиниці Гц), двигун повертатиметься ривками. Це буде особливо помітно при невеликому коефіцієнті заповнення ШІМ сигналу.
При частоті в сотні Гц двигун обертатиметься безперервно і його швидкість обертання буде змінюватися пропорційно коефіцієнту заповнення. Грубо кажучи, двигун "сприйматиме" середнє значення енергії, що підводиться до нього.
Схема для генерації ШІМ сигналу
Існує багато схем для генерації ШІМ сигналу. Одна з найпростіших – це схема на основі 555-го таймера. Вона вимагає мінімум компонентів, не потребує налаштування та збирається за одну годину.
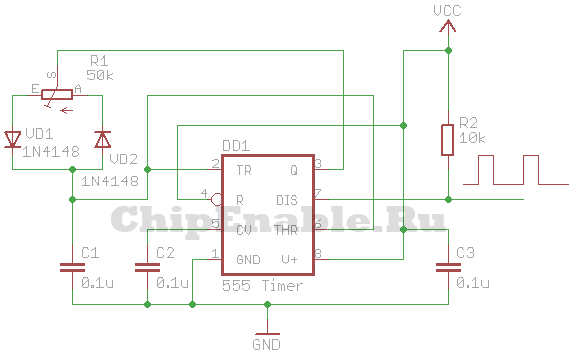
Напруга живлення схеми VCC може бути в діапазоні 5 – 16 Вольт. Як діоди VD1 - VD3 можна взяти практично будь-які діоди.
Якщо цікаво розібратися, як працює ця схема, потрібно звернутися до блоку схеми 555-го таймера. Таймер складається з дільника напруги, двох компараторів, тригера, ключа з відкритим колектором та вихідного буфера.

Виведення харчування (VCC) та скидання (Reset) у нас заведено на плюс харчування, припустимо, +5 В, а земляний (GND) на мінус. Відкритий колектор транзистора (висновок DISCH) підтягнутий до плюсу живлення через резистор і з нього знімається ШИМ сигнал. Виведення CONT не використовується, до нього підключено конденсатор. Висновки компараторів THRES і TRIG об'єднані та підключені до RC ланцюжка, що складається зі змінного резистора, двох діодів та конденсатора. Середній висновок змінного резистора підключено до виводу OUT. Крайні висновки резистора підключені через діоди до конденсатора, який підключений другим виводом до землі. Завдяки такому включенню діодів конденсатор заряджається через одну частину змінного резистора, а розряджається через іншу.
У момент включення живлення на виводі OUT низький логічний рівень, тоді на висновках THRES і TRIG завдяки діоду VD2 теж буде низький рівень. Верхній компаратор переключить вихід на нуль, а нижній на одиницю. На виході тригера встановиться нульовий рівень (оскільки має інвертор на виході), транзисторний ключ закриється, але в виведенні OUT встановиться високий рівень (оскільки в нього інвертор на вході). Далі конденсатор С3 почне заряджатися через діод VD1. Коли вона зарядиться до певного рівня, нижній компаратор перейде в нуль, а потім верхній компаратор перемикає вихід в одиницю. На виході тригера встановиться одиничний рівень, транзисторний ключ відкриється, а виведенні OUT встановиться низький рівень. Конденсатор C3 почне розряджатися через діод VD2, доки повністю не розрядиться і компаратори не переключать тригер в інший стан. Далі цикл повторюватиметься.
Приблизну частоту ШІМ сигналу, що формується цією схемою, можна розрахувати за такою формулою:
F = 1.44/(R1*C1), [Гц]
де R1 у омах, C1 у фарадах.
При номіналах зазначених на схемі вище, частота ШІМ сигналу дорівнюватиме:
F = 1.44 / (50000 * 0.0000001) = 288 Гц.
ШИМ регулятор обертів двигуна постійного струму
Об'єднаємо дві представлені вище схеми, і ми отримаємо просту схему регулятора обертів двигуна постійного струму, яку можна застосувати для управління обертами двигуна іграшки, робота, мікродриля тощо.
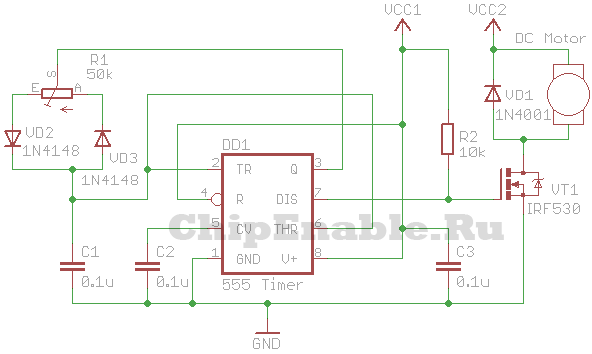
VT1 - польовий транзистор n-типу, здатний витримувати максимальний струм двигуна при заданій напрузі та навантаженні на валу. VCC1 від 5 до 16 В, VCC2 більше або дорівнює VCC1.
Замість польового транзистора можна використовувати біполярний n-p-n транзистор, транзистор дарлінгтону, опторелі відповідної потужності.
Регулювати напругу живлення потужних споживачів зручно за допомогою регуляторів із широтно-імпульсною модуляцією. Перевага таких регуляторів полягає в тому, що вихідний транзистор працює у ключовому режимі, а значить має два стани – відкритий чи закритий. Відомо, що найбільше нагрівання транзистора відбувається у напіввідкритому стані, що призводить до необхідності встановлювати його на радіатор великої площі та рятувати його від перегріву.
Пропоную просту схему ШІМ регулятора. Живиться пристрій від джерела постійної напруги 12В. При зазначеному екземплярі транзистора витримує струм до 10А.

Розглянемо роботу пристрою: На транзисторах VT1 та VT2 зібраний мультивібратор з регульованою шпаруватістю імпульсів. Частота проходження імпульсів близько 7кГц. З колектора транзистора VT2 імпульси надходять на ключовий транзистор VT3, який керує навантаженням. Добре регулюється змінним резистором R4. При крайньому лівому положенні движка цього резистора див. верхню діаграму, імпульси на виході пристрою вузькі, що свідчить про мінімальну вихідну потужність регулятора. При крайньому правому положенні див. нижню діаграму, імпульси широкі, регулятор працює на повну потужність.

Діаграма роботи ШІМ у КТ1
За допомогою цього регулятора можна керувати побутовими лампами розжарювання на 12 В двигуном постійного струму з ізольованим корпусом. У разі застосування регулятора в автомобілі, де мінус з'єднаний із корпусом, підключення слід виконувати через p-n-p транзистор, як показано на малюнку.
Деталі: У генераторі можуть працювати практично будь-які низькочастотні транзистори, наприклад, КТ315, КТ3102. Ключовий транзистор IRF3205, IRF9530. Транзистор p-n-p П210 замінимо на КТ825, при цьому навантаження можна підключати на струм до 20А!

І на закінчення слід сказати, що даний регулятор працює в моїй машині з двигуном обігріву салону вже більше двох років.
Список радіоелементів
| Позначення | Тип | Номінал | Кількість | Примітка | Магазин | Мій блокнот |
|---|---|---|---|---|---|---|
| VT1, VT2 | Біполярний транзистор | KTC3198 | 2 | До блокноту | ||
| VT3 | Польовий транзистор | N302AP | 1 | До блокноту | ||
| C1 | Електролітичний конденсатор | 220мкФ 16В | 1 | До блокноту | ||
| C2, C3 | Конденсатор | 4700 пФ | 2 | До блокноту | ||
| R1, R6 | Резистор | 4.7 ком | 2 | До блокноту | ||
| R2 | Резистор | 2.2 ком | 1 | До блокноту | ||
| R3 | Резистор | 27 ком | 1 | До блокноту | ||
| R4 | Змінний резистор | 150 ком | 1 | До блокноту | ||
| R5 | Резистор |
ШИМ або PWM (англ. Pulse-Width Modulation) - широтно-імпульсна модуляція- Це метод призначений для контролю величини напруги та струму. Дія ШІМ полягає у зміні ширини імпульсу постійної амплітуди та постійною частотою.
Властивості ШИМ регулювання використовуються в імпульсних перетворювачах, схемах управління двигунами постійного струму або яскравістю свічення світлодіодів.
Принцип дії ШІМ
Принцип дії ШІМ, як вказує на цю саму назву, полягає у зміні ширини імпульсу сигналу. При використанні методу широтно-імпульсної модуляції частота сигналу і амплітуда залишаються постійними. Найважливішим параметром сигналу ШІМ є коефіцієнт заповнення, який можна визначити за такою формулою:
Також можна відзначити, що сума часу високого та низького сигналу визначає період сигналу:
![]() де:
де:
- Ton - час високого рівня
- Toff – час низького рівня
- T - період сигналу
Час високого рівня та час низького рівня сигналу показано на нижньому малюнку. Напруга U1- це стану високого рівня сигналу, тобто його амплітуда.
![]()
На наступному малюнку представлений приклад сигналу ШІМ з певним часовим інтервалом високого та низького рівня.
![]()
Розрахунок коефіцієнта заповнення ШІМ
Розрахунок коефіцієнта заповнення ШІМ на прикладі:
![]()
Для розрахунку відсоткового коефіцієнта заповнення необхідно виконати аналогічні обчислення, а результат помножити на 100%:
![]()
Як випливає з розрахунку, на даному прикладі сигнал (високого рівня) характеризується заповненням, рівним 0,357 або інакше 37,5%. Коефіцієнт заповнення є абстрактним значенням.
Важливою характеристикою широтно-імпульсної модуляції може бути частота сигналу, яка розраховується за формулою:
Значення T, у нашому прикладі, слід взяти вже в секундах для того, щоб збіглися одиниці у формулі. Оскільки формула частоти має вигляд 1/сек, тому 800ms переведемо в 0,8 сек.
Завдяки можливості регулювання ширини імпульсу можна змінювати, наприклад, середнє значення напруги. На малюнку нижче показані різні коефіцієнти заповнення при збереженні тієї ж частоти сигналів і однієї амплітуди.
![]()
Для обчислення середнього значення напруги ШІМ необхідно знати коефіцієнт заповнення, оскільки середнє значення напруги є добутком коефіцієнта заповнення та амплітуди напруги сигналу.
Для прикладу, коефіцієнт заповнення дорівнював 37,5% (0,357) і амплітуда напруги U1 = 12В дасть середню напругу Uср:
![]()
У цьому випадку середня напруга сигналу ШІМ становить 4,5 Ст.
ШИМ дає дуже просту можливість знижувати напругу в діапазоні від напруги живлення U1 і до 0. Це можна використовувати, наприклад, для швидкості обертання двигуна DC (постійного струму), що живляться від величини середньої напруги.
Сигнал ШІМ може бути сформований мікроконтролером або аналоговою схемою. Сигнал від таких схем характеризується низькою напругою та дуже малим вихідним струмом. У разі необхідності регулювання потужних навантажень слід використовувати систему управління, наприклад, за допомогою транзистора.
Це може бути біполярний чи польовий транзистор. На наступних прикладах буде використано.
Приклад керування світлодіодом за допомогою ШІМ.
Сигнал ШІМ надходить на базу транзистора VT1 через резистор R1, інакше кажучи, транзистор VT1 зі зміною сигналу вмикається, то вимикається. Це подібно до ситуації, при якій транзистор можна замінити звичайним вимикачем, як показано нижче:
Коли перемикач замкнутий, світлодіод живиться через резистор R2 (обмежує струм) напругою 12В. А коли перемикач розімкнуть, ланцюг переривається, і світлодіод гасне. Такі перемикання з малою частотою в результаті дадуть.
Однак, якщо необхідно керувати інтенсивністю світіння світлодіодів, необхідно збільшити частоту сигналу ШІМ, так, щоб обдурити людське око. Теоретично перемикання з частотою 50 Гц не непомітні для людського ока, що у результаті дає ефект зменшення яскравості свічення світлодіода.
Чим менший коефіцієнт заповнення, тим слабше світитиметься світлодіод, оскільки під час одного періоду світлодіод горітиме менше часу.
Такий самий принцип і подібну схему можна використовувати і для . У разі двигуна необхідно, проте, застосовувати більш високу частоту перемикань (вище 15-20 кГц) з двох причин.
Перша стосується звуку, який може видавати двигун (неприємний писк). Частота 15-20 кГц є теоретичною межею чутності людського вуха, тому частоти вище цієї межі будуть нечутні.
Друге питання стосується стабільності роботи двигуна. При керуванні двигуном низькочастотним сигналом з малим коефіцієнтом заповнення обороти двигуна будуть нестабільні або може призвести до його повної зупинки. Тому, що вище частота сигналу ШИМ, то вище стабільність середньої вихідної напруги. Також менше пульсацій напруги.
Не слід, однак, занадто завищувати частоту сигналу ШІМ, так як при великих частотах транзистор може не встигнути повністю відкритися або закритися, і схема управління працюватиме неправильно. Особливо це стосується польових транзисторів, де час перезарядки може бути відносно великий, залежно від конструкції.
Надто висока частота сигналу ШІМ також викликає збільшення втрат на транзисторі, оскільки кожне перемикання викликає втрати енергії. Керуючи великими струмами на високих частотах, необхідно підібрати швидкодіючий транзистор з низьким опором провідності.
Керуючи , слід пам'ятати про застосування діода для захисту транзистора VТ1 від індукційних сплесків, що з'являється в момент вимкнення транзистора. Завдяки використанню діода, індукційний імпульс розряджається через нього та внутрішній опір двигуна, захищаючи цим транзистор.